Project: Autonomous Sumo Robot Car
My contributions included:
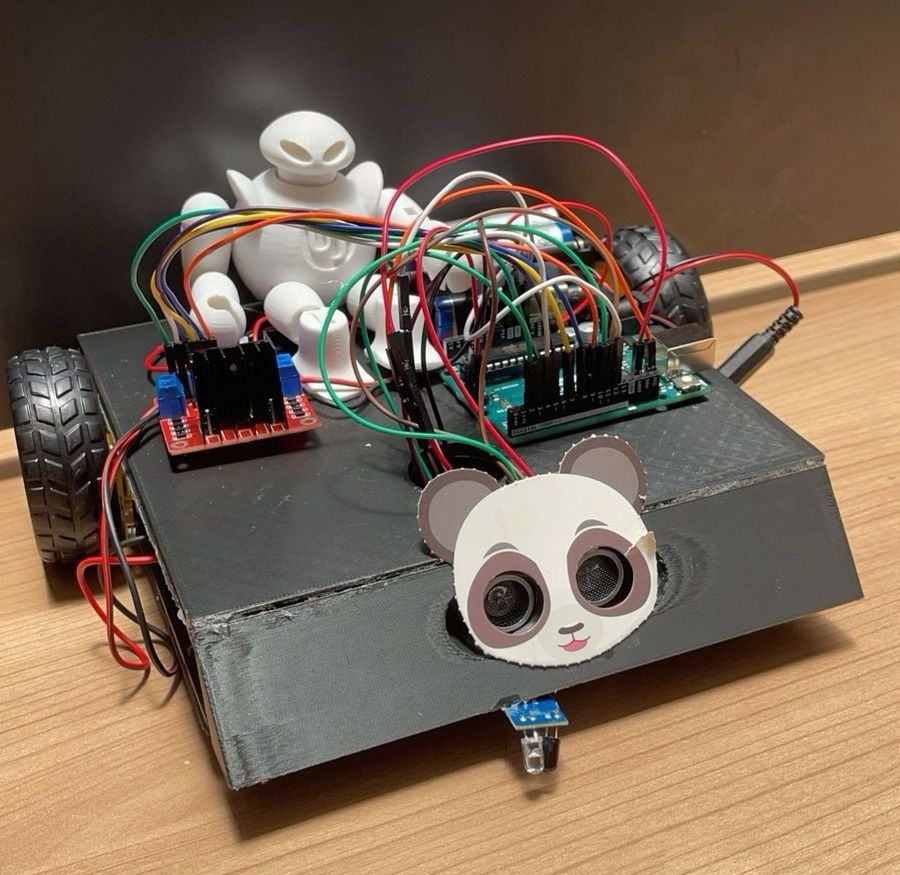
- Selected and resized a pre-designed 3D model from Tinkercad to fit the official sumo arena dimensions, ensuring proper scale and alignment.
- Built the hardware using Arduino Uno, H-bridge motor driver, an ultrasonic sensor for detecting opponents, and an IR sensor for tracking arena boundaries.
- Programmed the robot using the Arduino IDE, integrating sensor logic, movement control, and arena awareness.
- Conducted testing and iterations to validate functionality and ensure responsive, stable performance in the sumo competition environment.
- Achieved 2nd place out of 23 teams in the sumo robot competition, demonstrating strong design, hardware integration, and performance.